|
The 1965
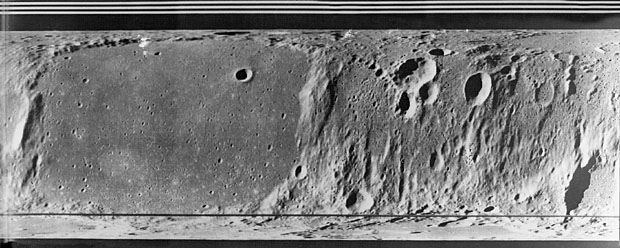
Zond-3 mission returned 23 pictures (with orange filter) and an UV
spectra of the far side of the Moon. A 106.4 mm objective lens was
used on this camera. In addition, some test patterns were pre-exposed
at the start and end of the film. Images were taken and developed
every 2.25 minutes, with alternating 1/100 and 1/300 second exposures.
A rapid 67 line/picture survey scan was first performed, and then
commands were sent to rescan images at high resolution, with some
resent several times. It continued on to a distance equivalent to Mars
fly-by, rewinding the film and testing image transmission several
times.
As before,
a 5-centimeter-band impulse transmitter sent pixel values to Earth, or
alternatively, an 8-centimeter-band continuous wave transmitter could
send the results. Most likely, both systems were tested at various
distances. In high-quality mode, images were sent at 550 pixels per
second (2 seconds per scanline), requiring 34 minutes to send a
1100×110 image.
A 285-355
nm UV spectrograph was incorporated into the camera and recorded onto
three frames of the film. A second, coaxial, UV spectrometer measured
190-275 with a photomultiplier detector and output digital telemetry.
A coaxial 3-4 micron IR spectrometer was included on Mars missions, to
investigate common organic molecular absorption bands, and a 6-40
micro IR spectrometer was included on Venus missions to investigate
thermal balance. Spectrometers were designed by A.I. Lebedinskii and
V.A. Krasnopol'skii.
Zond-2 may
have carried two of these cameras with 200 and 500 mm lenses, but
failed en route to Mars. Luna-12 carried two cameras of this design
(one with a 500 mm lens) in a low-altitude lunar orbit in 1966.
Luna-12 returned 40 images per camera at a doubled scanning speed. An
identical mission on Luna-11 experienced a failure of its orientation
system and photographed black space. Venera-2 carried one camera with
a 200 mm lens to Venus, but the spacecraft failed before its final
planetary-encounter telemetry playback.
|
 M-69
Phototelevision Complex M-69
Phototelevision Complex |
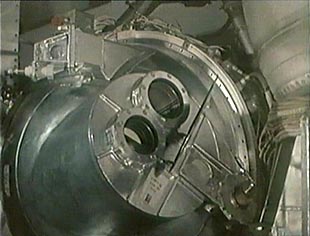 Pressurized
Housing Pressurized
Housing |
|
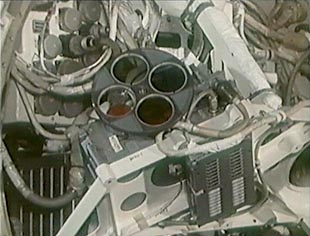
The
M-69 orbiter, a 1969 Mars attempt, contained three cameras of more
advanced design, with lenses of 35, 50 and 250 mm. A wheel of
glass filters (red, green, blue, clear) is used by one camera (or
perhaps shared by two cameras) to take color photographs. They
each held 160 images on a specially designed film. Upon arrival,
the film was chemically activated, so it would not be exposed by
cosmic radiation during the long flight. Images were scanned at
1024×1024 resolution and transmitted by pulse position modulation
on 6 GHz. Unfortunately, the two M-69 probes were destroyed in
launch failures of the new Proton rocket.
In
1971, Mars-2 and Mars-3 entered orbit. They each carried two
phototelevision cameras with 52 mm and 350 mm objectives. Little
telemetry was received from Mars-2, due to telemetry systems
problems. Mars-3 performed well, but its centimeter-band impulse
transmitter failed, and images were returned on the
pulse-code-modulated decimeter band. Only 60 images were taken
from December 1971 through March of 1972, some of which were
transmitted, but only at a low 250-line resolution. |
|
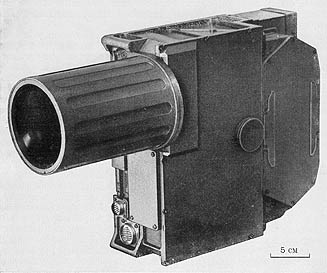 Mars-5
Camera "Zufar", 350 mm Mars-5
Camera "Zufar", 350 mm |
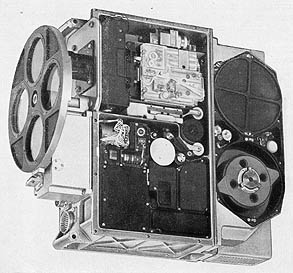 Mars-5
Camera "Vega", 52 mm Mars-5
Camera "Vega", 52 mm |
|
Mars-4
and Mars-5 orbiters carried the Mars-3 style phototelevision
cameras on their 1973 mission. The operation was essentially the
same as the Zond-3 camera, with various technical improvements in
the optics of the film scanner, using a newer FEU-103
photomultiplier tube. It held 480 frames on 20 meters of 25.4mm
film, stored in a radiation-shielded magazine.
Exposure alternated between 1/50 and 1/150 second, with a thin
calibration image between each frame. After development the film
could be rewound and scanned at various rates, by telecommand. Ten
scanning options were available. In practice, images were all
transmitted for preview at 235×220, nominal resolution was
940×880, and particularly interesting pictures were retransmitted
at 1880×1760 pixels, the highest quality mode. \
Transmission of images was carried out by a special purpose
impulse transmitter and pulse position modulation. Rates of 512 or
1024 pixels per second could be selected. 1024 pixels/sec is
sometimes given as "6144 bits/sec", assuming that 6 bits is
approximately the information in an analog pixel value. All other
telemetry was sent by the regular onboard transmitter, as digital
data on a phase modulated continuous carrier. |
|
 Image
from Mars-5 (350 mm lens) Image
from Mars-5 (350 mm lens) |
 Image
from Mars-5 (52 mm lens) Image
from Mars-5 (52 mm lens) |
|
As on
Mars-3, two cameras were installed on each spacecraft, one with a
350mm telescopic cassegrain lens with an orange longpass filter
("Zufar-2CA"), and the other with a 52mm lens and four color
filters ("Vega-3MCA"). These weighed 9.2 and 8.5 kilograms,
respectively. The wide-angle camera could be operated with the red
filter, the orange filter or a mode of sequentially shooting
through red, green and blue. Mars-4 returned 12 images during a
fly-by, and Mars-5 returned 108 images in the course of its
orbiting survey.
The
American Lunar Orbiter missions (1966-1967) carried film cameras
with automatic development and scanning. While the narrow-angle
images were badly motion blurred, the wide angle images were the
highest quality pictures taken of the Lunar surface up to that
point.
Optical-Mechanical Cycloramic Cameras
Selivanov and Iuri M. Gektin designed landscape cameras for Moon,
Mars and Venus landers. Instead of panning a television camera, he
decided to scan the scene with a pinpoint photometer. This
required a much simpler apparatus with some advantages. A precise
measurement of luminance was made at each pixel, and the entire
landscape was returned as a single seamless image.
These
cameras probably evolved from early cycloramic telephotometers by
A.M. Kasatkin and others, used for low-resolution UV imaging and
photometry from high altitude rockets. Luna-4 through Luna-8
contained a cycloramic optical-mechanical camera built by I.A.
Rosselevich's team at the Leningrad Scientific Research Institute
of Television. It was heavier and lower resolution than
Selivanov's Luna-9 camera, and it operated inside a pressurized
glass cylinder instead of being exposed to vacuum. |
|
 |
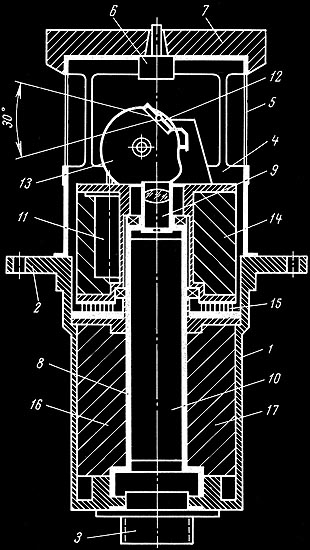 |
-
80 × 205 mm housing
-
Mounting flange
-
Electrical connector
-
Cap
-
Thin dacron window
-
Pressure equalization
valve
-
Thermal insulation cover
-
Support pipe
-
Objective lens & diaphram
|
-
FEU-54 photomultiplier
tube
-
Scanner motor
-
Scanning mirror
-
Shaped pushing-mirror cam
-
Motor control electronics
-
Electrical connection
brushes
-
Photomultiplier power
supply
-
Logarithmic pentode
amplifier
|
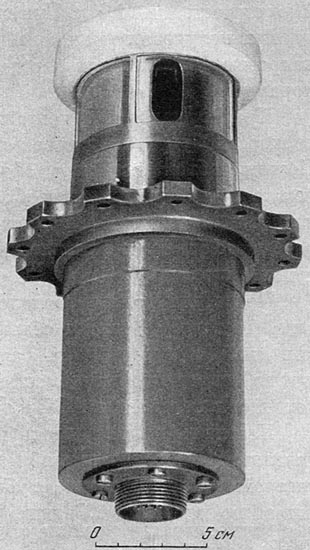
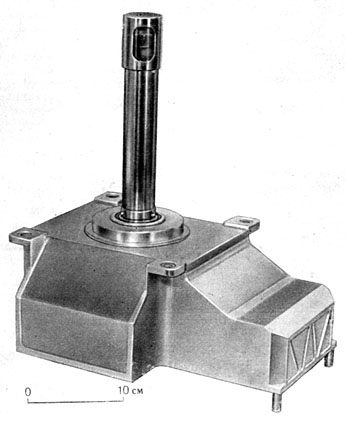
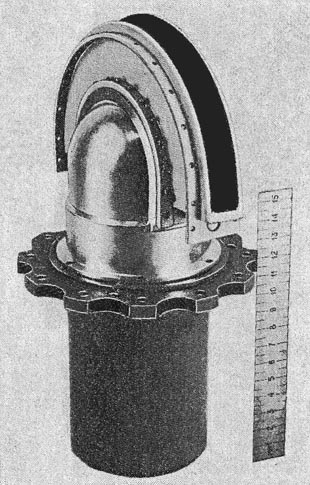
On the
Luna-9 camera, seen above, the objective lens was focused at the
hyperfocal distance, returning a sharp image of terrain between
1.5 meters and the horizon. Logarithmic photometry and automatic
gain control (governed by a photocell) allowed the camera to
operate with a wide range of luminance, from 80 to 150,000 lux.
Sensitivity could also be adjusted by telecommand. The PMT and
amplifer were the same as in the film scanner of the Zond-3
phototelevision camera. Remarkably, while containing vacuum tubes,
a motor and the 1700 volt power supply for the PMT, the camera
weighed 1.3 kilograms and consumed only 2.5 watts.
The
upper assembly with oscillating mirror and motor rotated freely in
the metal sleeve, making electrical contact through brushes.
Scanning was vertical, with slow rotation to sweep out the
horizontal image swath. The finely built mechanical action of the
mirror was precise to 1/3 pixel spacing. A full 29° × 360°
panorama of 6000 vertical lines could be returned in 100 minutes.
On command, the camera could scan forward, in reverse, or at 4×
speed for quick survey or positioning. A 250 Hz analog video
signal was generated, which was frequency modulated on a 1.5 KHz
subcarrier. That in term was phase modulated onto the 183.538 MHz
telemetry carrier.
250
cycles per line is theoretically equivalent to 500 pixels, which
is how the resolution is often reported. Lunar images were sent as
analog video, because a strong communication channel could be
established between the Moon and the 32-meter dish at Simferopol.
For later missions to Mars and Venus, the video signal was digital
from camera to ground station. |
|
 Fragment
of Luna-13 panorama Fragment
of Luna-13 panorama |
 Full-resolution
detail Full-resolution
detail |
|
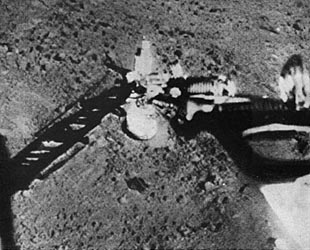
The
images above show part of the lunar landscape revealed by the
Luna-13 camera. Pieces of the landing craft are seen in the
distance on the left view. On the right, a detail at original
resolution shows the extended gamma-ray densitometer and a close
view of the lunar soil. These first landers relieved fears that
the lunar surface might be composed of dust, into which spacecraft
would sink.
It is
important to remember that we can only see scans of printed
images, many generations of duplication from the original
electronic signal. Unless the magnetic tapes of the FM video
signal are read and processed into modern digital images, we will
not see the true quality of these images. |
|
 Luna-9
Lander Luna-9
Lander |
 Luna-13
Lander Luna-13
Lander |
 Mars-3
Lander Mars-3
Lander |
|
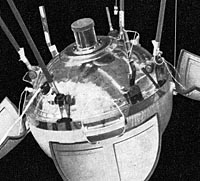
Luna-9
was the first spacecraft to land on the Moon, using an airbag
landing system similar to the recent Mars Pathfinder. In 1966, it
returned three panoramas. Its signals were also intercepted by the
British radio telescope at Jodrell Bank, and a Manchester
newspaper published the pictures before the Russian press.
Luna-13
returned five panoramas from another landing site, later that
year. Taken over several days, they show the surroundings under
different angles of illumination (the Moon rotates 13° per day).
It had two cameras for redundancy or stereo, but one failed.
In
1971, Mars-3 was the first spacecraft to land on the red planet.
Two cycloramic cameras were installed, as on Luna-13. Like the
second generation lunar cameras, they had 500 × 6000 pixel
resolution, and scanned at 4 lines per second.
Pen Plotter Displays Signal from Mars-3 Lander
Unfortunately, contact with the lander was lost after only
returning 15 to 20 seconds of video from each camera. This
fragmentary image of 79 scanlines has been reported to be
featureless, despite extensive computer analysis by Soviet
scientists. The plotter, shown above in a Soviet documentary on
Mars-3, is drawing the video signal in horizontal strokes. The
image is often misinterpreted as a view of the Martian horizon,
but the cycloramic camera was transmitting vertical strokes, just
as the Luna-9 camera did. Thus the image should be rotated 90°,
and its interpretation is unclear.
America's first Mars landers, in 1976, adopted the Soviet style of
cycloramic cameras, using a mechanically swept 512-pixel linear
CCD. |
|
 Luna-16
Cameras Luna-16
Cameras |
 Lunokhod
Cameras Lunokhod
Cameras |
|
The
second generation lunar missions contained improved versions of
the cycloramic cameras, scanning at 4 strokes/second, and using
the more stable and sensitive FEU-96 photomultiplier tube.
Automatic gain control for these cameras, and later Venus/Mars
cameras, used an electronic circuit that monitored the camera
output. Gain adjustments were smoothed over 5 to 10 seconds. The
sample-return missions, Luna-16 and 20 had a stereo pair of
cameras focused on the drilling site to guide placement. Their
resolution was 300×6000, and they were capable of viewing the sky
and spacecraft. Luna-16 landed during Lunar night, illuminating
the drilling area with lamps.
 
Panoramas from Lunokhod-1
The
Lunokhod rovers (1970 and 1973) contained four cycloramic cameras
(a pair on either side) for high quality imaging of the Lunar
surface and sky. Cameras scanning about an axis 15° from vertical
covered a 180° panorama from 1.4 meters to the horizon. Cameras
scanning about an horizontal axis could cover a 360° view
including the sky and stars, the ground beside the wheels, and a
device to show precise rover level.
Generating 1000 Hz video signals, two cycloramic cameras could
transmit at once, on subcarriers of 130 and 190 KHz. The
resolution of a 360° panorama was 500 × 6000, and hundreds of
panoramas were returned by the rover missions. For navigational
purposes, two low-resolution vidicon cameras were mounted on the
front of the rover, returning 250 lines of video at 10 frames per
second. |
|
 Camera
on Venera-9 Lander Camera
on Venera-9 Lander |
 Quartz
Pressure Window Quartz
Pressure Window |
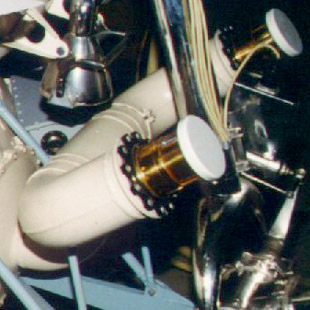
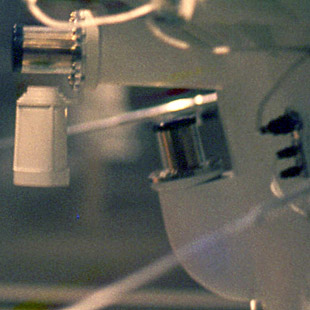
|
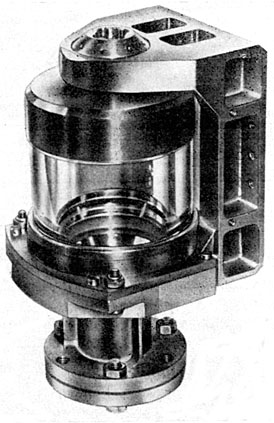
Venera-9 and Venera-10 were the first probes to carry cameras to
the surface of Venus, in 1975. Conditions on Venus are extreme,
pressures of almost 100 atmospheres and temperatures up to 475° C
(890°: F). To function in this hostile environment, several
changes had to be made, although the basic design principals
remained the same: a scanning mirror and a pinpoint photometer
based on a photomultiplier tube.
The
camera housing was mounted within the spherical pressure hull of
the lander, and a periscope extension reached into a cylindrical
pressure window. The scanning mirror was moved by push wires, and
was designed to operate at Venusian surface temperatures. The tube
of the periscope was relatively nonconductive, and the camera
housing was packed with a heat-absorbing phase-change material.
Forming a seal between the titanium frame and the quartz pressure
window was particularly difficult, since differing thermal
expansion takes place between outer space and the surface of
Venus. Gold
gaskets and specially shaped grooves solved this problem.
|
|
 Camera
Schematic Camera
Schematic |
 Placement
of Camera Placement
of Camera |
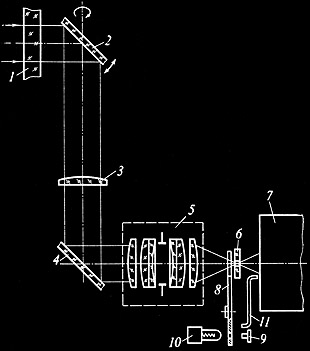
-
10 mm quartz window
-
Scanning Mirror
-
Compensating Lens
-
Fixed Mirror
-
28 mm Objective Lens
-
Image-Plane Aperture
|
-
Photomultiplier Tube (FEU-114)
-
Shutter
-
Photosensitive Diode
-
Stablized Lamp
-
Light Guide
|
The
compensating lens (3) was an elegant feature, designed to cancel
out the refractive effect of the thick quartz pressure window.
Focusing at the hyperfocal distance yielded a depth of field from
0.8 meters to infinity. The camera was programmed to scan forwards
and backwards until the lander ceased to function. During the
return stroke, a calibration signal from a stabilized lamp was
admitted to the photometer.
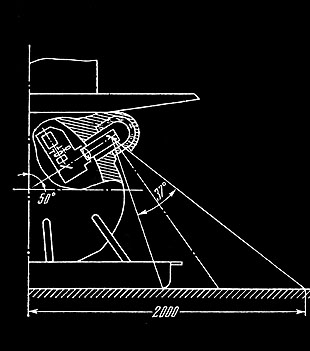
Two
cameras were mounted symmetrically on a lander, angled to view
both the immediate foreground and the horizon, in a single 180°
panorama. The 128×512 resolution was scanned at one line every 3.5
seconds, much smaller and slower than the lunar cameras. This was
dictated by the telemetry rate (256 bits/sec) and the estimated
minimum lander lifetime of 30 minutes. Note that 13 pixels of each
line was a calibration pattern sent during retrace, and 115 pixels
were video image data. Contact was actually maintained for 50 to
60 minutes, and almost two complete panoramas were returned by
both missions. Only one camera functioned on each lander.

Venera-10 Panorama
The
output of the photomultiplier and logarithmic amplifier was
digitized to 6 bits/pixel, with a seventh parity bit. All radio
transmission from the lander to the orbiter was digital.
More
information about these missions and spacecraft can be found
here.
The Venera-9 panorama can be viewed in a full-size format
here.

Degraded Publication of Venera-10 Panorama
Soviet
space images are sometimes printed in astonishingly degraded
forms. This is partially the result of generation loss, and partly
an effect of cold-war-era propaganda. Sometimes the only available
glimpse of a device or an image from space is a photocopy from a
Russian journal.

Venera-13, Short Program (Camera I)
Venera-13, Complete Program (Camera II)
Venera-13 and Venera-14 landed on Venus in 1982, returning higher
resolution images in color. Bandwidth between lander and the
fly-by relay spacecraft was increased by a factor of 12, allowing
252×1024 pixel images to transmitted at one line per 0.82 seconds.
41 pixels per line comprised a retrace pattern, including the
scanning of a stabilized light source through a photometric wedge.
The basic design was very similar to the Venera-9 camera, but with
many improvements. The low noise of the photomultiplier tube gave
a signal-to-noise ratio of 1000, allowing the video to be
digitized at 9 bits per pixel. A 10th bit was added
with parity.
Each
lander had two cameras, which repeatedly executed programs of
scanning and color filter changes. One camera executed a "short
program", beginning with a 180° scan through the clear filter,
then scanning back and forth for 60° with red/green/blue filters,
and finally a 120° clear image as it reversed back to its starting
position. This would ensure a complete panorama and a full color
section, even if the lander only survived for 30 minutes. The
second camera executed a "long program", scanning a full 180° with
clear, red, green and blue filters.
They survived about two
hours, and returned multiple panoramas. |
|
 Enamel
colors Enamel
colors |
 At
500° C and 100 atm At
500° C and 100 atm |
 Illuminated
by Sky Illuminated
by Sky |
|
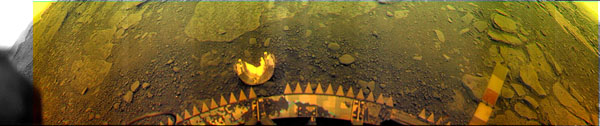
The
deployed color-calibration panels consisted of blue, green, red
and gray sections of polysiloxane enamel and metal-oxide pigment.
Their color is depicted above, sRGB values calculated from
measured spectra. The enamels were tested and spectrographed under
simulated temperature and pressure to measure the thermochromic
and piezochromic color shifts. The overall orange illumination
seen in the color panoramas is due to Rayleigh scattering and
possibly an unknown blue-absorbing chemical in the lower
atmosphere. The zenith sky spectrum was accurately measured by the
lander, and its illumination of the heated, pressurized enamel
spectra can be calculated.
The
calculated colors do not exactly match the panels in the color
panoramas. The overall illumination is not only from the zenith
color, although that should give the most contribution. The panels
could be slightly covered with dust, and although they are made
from highly resistant material, they could have been effected by
atmospheric chemicals. However, the largest effect is simply that
the images from Venera-13 and 14 have never actually been properly
color balanced, nor has the radiometric response function of the
camera been established. We do not yet know the precise colors of
Venus.
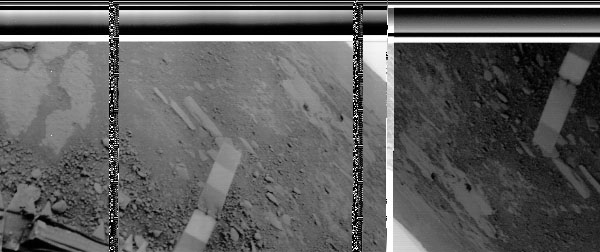
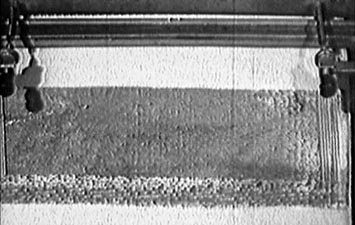
Section of Raw Venera-13 Digital Video
Venera
cameras transmitted one continuous digital video signal, without
break. The two vertical bars of "static" seen above are
interruptions to transmit telemetry from other onboard
experiments. The horizontal bars running across the top are the
video front porch and a calibration signal fed into the photometer
from an optical-density ramp and a stabilized light source.
Starting from the left, the scanner is working though a clear
filter with automatic gain control (note variations in the
brightness of the calibration). The narrow band of very bright
scanlines indicates that a high constant-gain setting has been
switched on by the program control. The direction of the scanning
also reversed at that point. A few scan lines later, the red
filter has dropped into position, and the image becomes darker.
|
|
Optical-Mechanical Linear Cameras
Conventional cameras focus an image onto a 2-dimensional image
sensor. One problem with this is the limitation of resolution
imposed by image sensor technology. It is easier to build a
1-dimensional camera and allow the orbital motion of the
spacecraft to sweep it across the planet. An innovation often
attributed to Landsat-1, Soviet scientists first deployed linear
cameras a year earlier, on Luna-19. Built by Arnold Selivanov and
Iuri Gektin, they represent an evolution of the panoramic camera
used on Luna-9 in 1966. |
|
 Luna-19
and Luna-22 Camera Luna-19
and Luna-22 Camera |
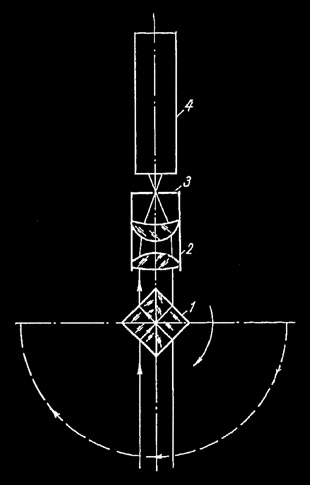 Schematic Schematic
|
|
These
cameras, for 1971 and 1974 low-orbit survey, were designed to
produce long, high-quality panoramas of the lunar surface. They
used a photomultiplier tube (4) as the detector, with a spinning
prism to scan a 180° "cylindrical fisheye" image. The scan rate
was 4 lines per second. From an altitude of 100 kilometers, the
craft could resolve 100 meters along the direction of scanning,
and 400 meters along the perpendicular direction of flight. The
images extend to the lunar horizon, which was used to help
calculate the precise orbital motion of the satellite
Fragment of a Luna-22 Panorama
The
Luna-19 and Luna-22 "heavy orbiters" are still somewhat mysterious
missions, although one objective was the mapping of the Moon's
uneven gravitational field. Luna-22 adjusted its orbit until it
was skimming the lunar surface at 15 to 30 kilometers distance.
By one report,
Luna-19 returned 5 panoramas and Luna-22 returned 10. |
|
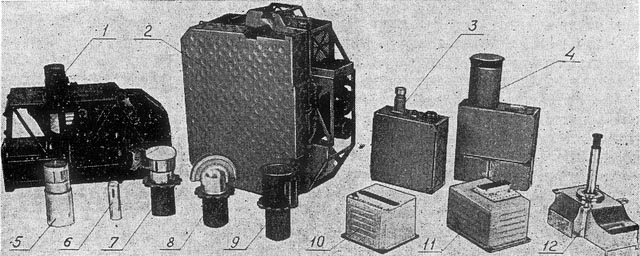
 Camera
System on Venera-9/10 and Mars-4/5 Orbiters Camera
System on Venera-9/10 and Mars-4/5 Orbiters |
|
The
Mars-4, Mars-5 and Venera-9 orbiters contained linear cameras
designed by Gektin and his team. They scanned images 30° wide and
arbitrarily long, as the orbit of the spacecraft swept across the
planet. The camera design was similar to the cycloramic camera on
Luna-9, but its scanning mirror oscillated without the need of a
rotating assembly, using the satellite's orbital motion to sweep
out an image swath. It used automatic gain control and operated in
a logarithmic-photometer mode. Each scanline included some black
and white calibration stripes transmitted during the return
stroke.
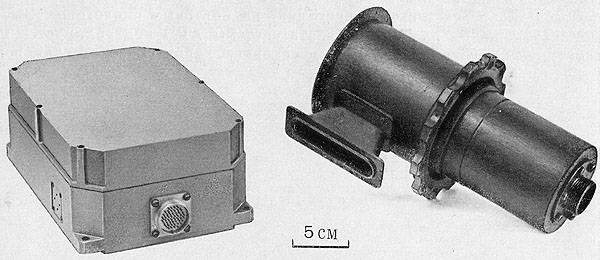
The
box, above left, is an analog 4-track tape-loop recording device
designed to work with this linear camera. It recorded up to 45
minutes of two 1000 Hz video signals as well as two
synchronization signals from the onboard crystal oscillator. Both
cameras could be simultaneously recorded for 45 minutes, or one
camera could record for 90 minutes. The video could be read and
digitized for transmission to Earth, at two speeds (i.e., at two
pixels/line resolution).
Reports
claim the tape recorder was also used to store the video signal
from the lander, although technical papers stress that the radio
signal from the Venera and Mars landers to the orbiter was
digital, not analog. |
|
 Mars-5
Linear Camera Image (Orange Filter) Mars-5
Linear Camera Image (Orange Filter) |
 Venera-9
Image (UV Filter) Venera-9
Image (UV Filter) |
|
The
Mars cameras used two photomultiplier tubes and returned images in
three wavelength ranges. A PMT-112 (AgOCs cathode) with a red
glass long-pass filter was used to image in infrared. A PMT-114 (multialkali
cathode, also used on Venera lander) was used with red and orange
glass filters to image those colors. The cameras scanned at 4
lines/second, generating 1000 Hz video (250 cycles/line), which
was recorded on magnetic tape. The primary readout rate was 1
line/second, transmitted to Earth probably at 256 or 512
pixels/line. The option existed to scan at 4 lines/second and send
reduced resolution at higher speed. Mars-4 returned 2 panoramas,
and Mars-5 returned 5 panoramas.
The
Venus cameras both used the PMT-114 with violet and ultraviolet
filters to obtain images in those spectral ranges. It scanned at 2
lines/second, generating 1000 Hz video (500 cycles/line). During
transmission to Earth, the tape could be read and transmitted at
256 pixels/line in the primary mode, or at a slower special rate
of 512 pixels/line. Venera-9 performed 17 survey missions from
October 26 to December 25, 1975, using the ultraviolet camera with
the violet camera sometimes recording simultaneously. Resolution
was 6.5 to 30 km, depending on the spacecraft altitude.
The
panoramas, recorded over 30 to 50 minutes, were probably about 256
× 6000 × 6-bits in size, and contained highly elongated images of
the planet. They were contrast enhanced and linearly compressed by
scanline averaging, to reduce noise and geometric distortion.
These images were higher resolution than the later Pioneer Venus
cloud photometer, but unfortunately the images from this survey
have never been released to the public. The poor-quality images
above are scanned photocopies of printed pictures.

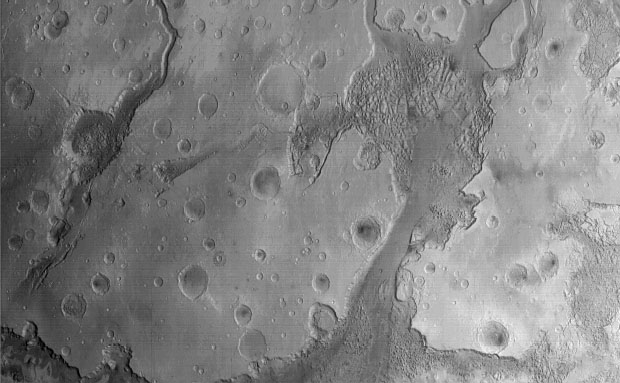
Fobos-2 Thermal Image of Mars
In
1988, the Soviet Union launched Fobos-1 and -2, Mars orbiters with
small vehicles intended to land on Phobos. Selivanov and Gektin's
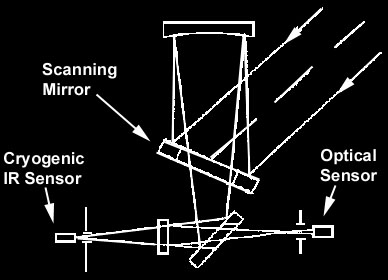
team designed a 28 kilogram optico-mechanical camera, similar in
basic design to the Mars-5/Venera-9 linear cameras. Called
TERMOSKAN, the camera contained two detectors: One for 600-950
nm returned images in the red and near-infrared range. The other,
cooled by liquid nitrogen, imaged the thermal infrared wavelengths
from 8.5 to 12
μm.
Seen above is the third of four scans around the equator of Mars,
512×3100 pixels, from Olympus Mons to the Valles Marineris.
The
spacecraft was 3-axis stabilized, with the TERMOSKAN camera
pointed away from the Sun. A moving mirror scanned one dimension
at 512 pixels/line and 1 line/second. The nearly circular orbit of
the spacecraft moved the camera in a swath across the illuminated
face of the planet. The faint horizontal streak is the shadow of
Phobos, following the spacecraft's orbit.
Full Size Detail of Thermal Imaging
Above
is a full sized section from the second scan in the far infrared.
With 1.8 km resolution, the Fobos-2 images are several times
higher resolution than the recent thermal IR images from Mars
Global Surveyor. Each scan line consists of 384 pixels of image
and 128 pixels of calibration data (which has been omitted). A
later version of the camera was installed on Mars-96, which was
destroyed in a launch mishap. |
|
 Image
from MSU-SK Image
from MSU-SK |
 Image
from MSU-E Image
from MSU-E |
|
Linear
optical-mechanical cameras have been applied to non-military Earth
observation satellites. In the early 1970s, two scanners were
developed by Selivanov's team, for the Meteor weather satellites:
MSU-M scanned 4 lines/sec by oscillating mirror (similar to the
Mars-5 camera). It swept a 3000 km swath at four bands in the
visible and infrared. MSU-S scanned 48 lines/sec by spinning prism
(similar to the Luna-19 camera). It swept out a 2000 km swath with
240 meter resolution, in two spectral bands.
The two
images above show images gathered from MIR in the 1990s. The
latest spinning-prism scanner, the MSU-SK, has been installed on
Meteor-3M, Okean and Resurs-O satellites, as well as the MIR space
station. It sweeps out a 600 km wide swath with an arc-shaped
scan, returning up to 4756 pixels/line. It is combined with the
MSU-E push-broom camera, which uses three 2048-element linear CCD
sensors. The MSU-E returns 200 lines/sec in a 45 - 78 km swath,
running down the center of the MSU-SK image. A 24-bit image is
returned, consisting of three channels selected from the set of 5
spectral bands on the MSU-SK and 3 bands on MSU-E.
Returned-Film Camera Systems
The
highest quality images of the Earth and Moon have come from
returned film, taken automatically or by astronauts. In America,
the civilian space program was forbidden to develop automatic
returned-film camera systems, a matter of some dispute during the
planning of Landsat. In the Soviet Union, the division between
military and civilian space programs was less distinct. With high
resolution returned-film imagery from Resurs-F available for
topographic and Earth-resource applications, Soviet
linear-scanning satellites like Resurs-O were designed for wider
coverage than Landsat. |
|
 Zenit
Satellite Zenit
Satellite |
 Zenit-8
Return Capsule Zenit-8
Return Capsule |
 Resurs-F1
Capsule Resurs-F1
Capsule |
|
The
world's first surveillance satellite was the Zenit-2, developed
concurrently with the Vostok manned missions, and using the same
spacecraft. Since 1961, over 700 Zenit or Resurs-F satellites have
flown, carrying a variety of camera systems and returning them in
the spherical landing capsule. The original Ftor-2 camera system,
consisting of a 200 mm and 1000 mm camera, was designed by Iu.V.
Riabushkin.
The
Zenit-8 capsule above shows two telescopic KFA-3000 cameras, with
a folded 3000 mm focal length. It probably held about 1800 frames
of film, each 30 × 30 cm, yielding 2-3 meter resolution. The
camera systems were used an average of three times, before worn
out by repeated launching and reentry.
The
Resurs-F1 capsule above shows five cameras. Two KFA-1000 cameras
shot 30 × 30 frames of b/w or spectrozonal film through 1000 mm
objectives (4-6 meter resolution). Three KATE-200 cameras shot 18
× 18 cm color film through 200 mm objectives (15-30 meter
resolution). Spectrozonal film recorded 570-680 nm and 680-810 nm
wavelengths in separate emulsion layers. |
|
 Rome
from Resurs-F1 Rome
from Resurs-F1 |
 Los
Angelas from Resurs-DK Los
Angelas from Resurs-DK |
|
Examples of Soviet returned-film imagery are impressive. The
Resurs-DK camera has a resolution of 1 meter. Russian companies
now sell returned-film imagery from regions outside their national
boundaries. |
|
 Zond-7
Image Zond-7
Image |
 Zond-8
Image Zond-8
Image |
|
Zond-5
through Zond-8 returned film images of the Moon and Earth from
1968 to 1970. The camera system was developed at the Moscow State
University of Geodesy and Cartography (MIIGAiK) under Boris N.
Rodionov. Zond-6 and 8 carried a 400 mm camera using 13 × 18 cm
frames of panchromatic film. Zond-7 carried a 300 mm camera
shooting on 5.6 × 5.6 cm film (both color and panchromatic). The
original Zond-8 negatives have been digitized in Moscow to about
8000 × 6000 pixels, and are still among the best close images of
that planet.
Biographies
|
 P.F.
Bratslavets P.F.
Bratslavets |
 A.S.
Selivanov A.S.
Selivanov |
 Iu.M.
Gektin Iu.M.
Gektin |
Acknowledgements
Many
image are from NASA and come courtesy of their generous
non-commercial usage policy. In particular, many are from the web
site of David R. Williams, National Space Science Data Center,
nssdc.gsfc.nasa.gov.
The photograph of Luna-9 is courtesy of J. Porter Clark. The
Luna-22 panorama is courtesy of Phil Stooke.
Special
thanks to Yuri Gektin for answering a few questions about the
Venera-9 camera. Jim Head was kind enough to share their Venera-13
images, and personel at the Russian archive found and formatted
the original raw image transmission for me. |
Copyright ©
2003,2004 Don P. Mitchell. All rights reserved. |



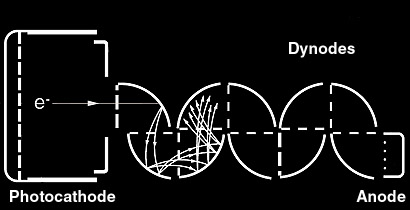 Front-End
Photomultiplier Tube
Front-End
Photomultiplier Tube 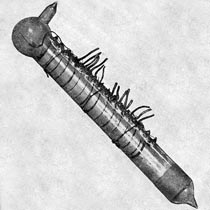 The
First Photomultiplier Tube
The
First Photomultiplier Tube  Luna-3
Camera ("Enisei")
Luna-3
Camera ("Enisei")  Receiving/Recording
System
Receiving/Recording
System 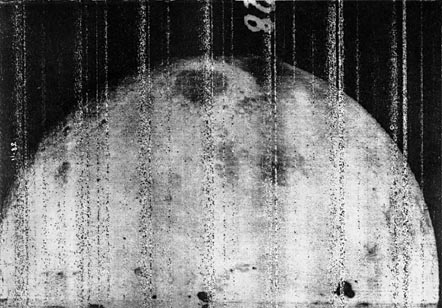 Luna-3
Frame 28
Luna-3
Frame 28 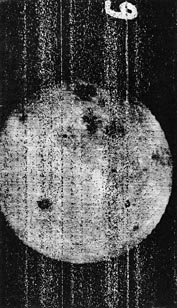 Frame
29
Frame
29 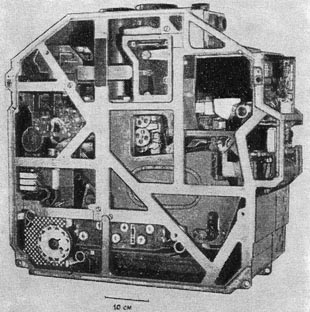 Mars-1
Camera
Mars-1
Camera 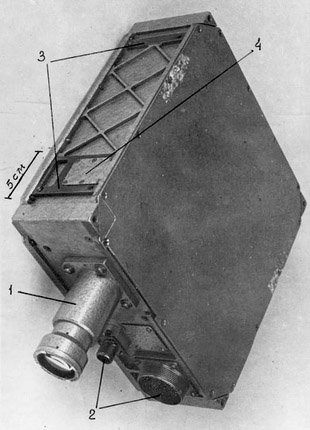 Zond-3
Camera
Zond-3
Camera 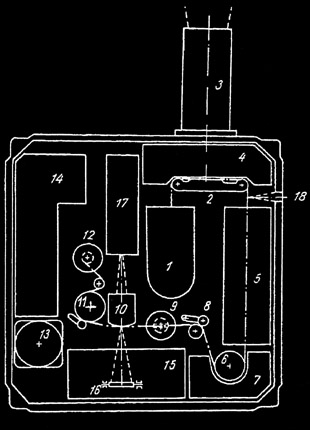 Diagram
Diagram

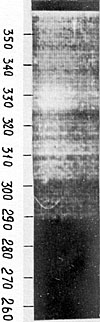 UV
Spectrum
UV
Spectrum